
Description
EP6C-50 Precision Clamp-Hub Oldham Coupling — 50 mm Aluminum Hub for SCARA-Robot and Lithography-Stage Drives
The EP6C-50 precision clamp Oldham coupling moves the EP6C family into the duty class where servo torque and rotational accuracy intersect with substantial mechanical demand. With 19 N·m continuous / 38 N·m peak torque rating, 50 mm hub OD, 14–20 mm bore range, and 3 000 rpm permissible speed, the EP6C-50 is sized for SCARA-robot shoulder-axis drives, photolithography stage-positioning axes, semiconductor-front-end wet-process indexing drives, and the precision-packaging machinery main rotation drives that anchor higher-end pharma and food packaging lines. Across these application classes, the EP6C-50 delivers a combination of torque capacity, zero-backlash transmission, and shaft-preserving clamp mounting that the alternatives — bellows couplings, disc-pack couplings, oversized spider couplings — cannot simultaneously achieve.
An engineering detail worth noting at the EP6C-50 size: the hub bore range extends to 20 mm, accommodating the larger encoder-output shafts and reducer-input shafts typical of higher-torque servo systems. This bore range corresponds directly to the IEC 60072 standard frame-mounted servo motor output specifications for the 200–400 W power class — making the EP6C-50 a precise fit for the dominant population of mid-power industrial servo installations. OEM equipment designers specifying the EP6C-50 will find it integrates naturally with this servo-system population through dimensional accommodation that does not require non-standard adapter parts or bushing modifications.
Specifications
| Parameter | Value |
|---|---|
| Model | EP6C-50 |
| Continuous Torque (Tn) | 19 N·m |
| Peak Torque (Tmax) | 38 N·m |
| Permissible Speed (n) | 3 000 rpm |
| Bore Range (d) | 14 – 20 mm |
| Outside Diameter (D) | 50 mm |
| Overall Length (L) | 66 mm |
| Clamp Bolt Size | M6 (2 per hub) |
| Clamp Bolt Torque | 10 N·m |
| Radial Misalignment (Δy) | 0.6 mm |
| Angular Misalignment (Δα) | 1° |
| Axial Misalignment (Δx) | 0.6 mm |
| Mass | 155 g |
| Backlash | Zero |
| Operating Temperature | -30 °C to +80 °C |
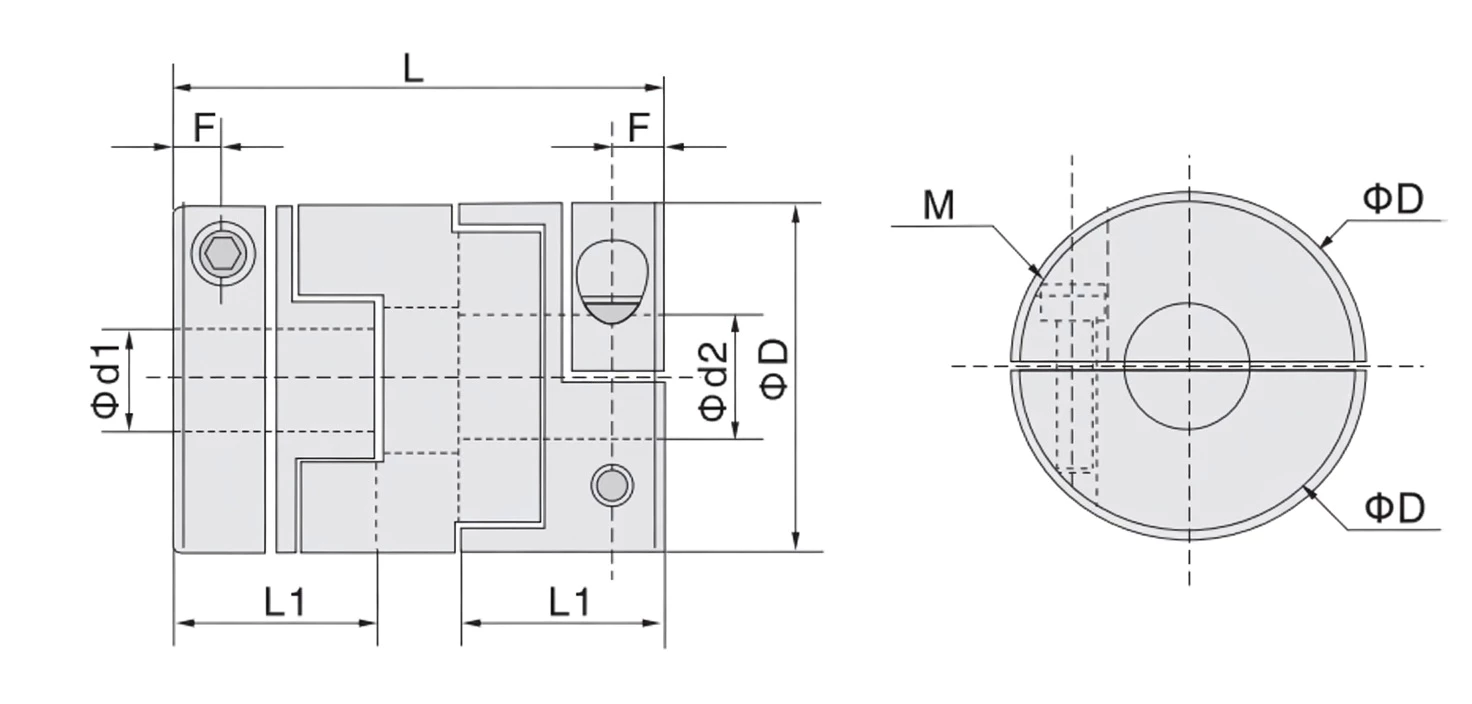
Materials
2A12 / 7075-T6 Aluminum Clamp Hubs
Standard hub material is 2A12 aluminum alloy with anodised surface treatment. For high-cycle deployments (industrial robots, packaging-line main drives with frequent reversal duty), 7075-T6 high-strength variant is the engineering-preferred upgrade — its higher tensile strength delivers expanded margin against the substantial M6 clamp-bolt torque-induced hoop stress and accommodates the peak-torque excursions of dynamic-control servo systems. Each hub masses approximately 70 g.
POM-C Self-Lubricating Slider
Precision-injection-moulded POM-C acetal polymer with PTFE additive for self-lubrication across the full -30 °C to +80 °C operating range. POM-C delivers consistent friction coefficient across the operating temperature window, inherent vibration damping, and electrical-isolation between drive and driven shafts. For lithography stage applications requiring very low particulate emission, a USP Class VI-compatible POM-C variant with extra-stringent particulate certification is offered.
M6 Class 12.9 Clamp Hardware
Standard clamp-bolt hardware is M6 socket-head cap-screw to ISO 4762, property class 12.9, electro-galvanic-zinc plated. For stainless-hub variants, A4-80 stainless clamp hardware is supplied. The increased clamp-bolt size (M6 versus M5 on EP6C-40) provides expanded torque margin for the higher rated torque level and accommodates the larger bore range. Calibrated-torque installation is essential for production environments — clamp-bolt torque-verification is a recommended quality-checkpoint step.
Engineering for SCARA-Robot Shoulder Axes
SCARA robots — Selective Compliance Articulated Robot Arms — operate within a specific engineering envelope that favours the EP6C-50’s architectural characteristics. The shoulder-axis (also called the J1 axis) typically carries the largest reduction-ratio and the highest torque demand of the entire robot kinematic chain, with the arm payload swinging through wide arcs at substantial speed. The drive coupling between the shoulder-axis motor and reducer input shaft must transmit substantial torque, accommodate the unavoidable parallel-misalignment of the motor-and-reducer-frame stack-up, deliver zero-backlash for end-effector positioning accuracy, and survive an indefinitely large number of reversal cycles without measurable wear.
The EP6C-50 meets each of these requirements through specific architectural features. The 38 N·m peak torque rating provides comfortable margin against the typical 20–28 N·m peak demands of mid-power SCARA shoulder drives. The 0.6 mm parallel-misalignment envelope absorbs the realistic frame-tolerance accumulation. The zero-backlash transmission supports the sub-arcminute positioning repeatability of higher-end SCARA designs. And the POM-C slider’s documented unlimited fatigue life under reversal duty — combined with the clamp-mount’s unlimited installation cycles — addresses the reliability profile that high-utilisation production robots require. The combined offering has kept the EP6C-50 on SCARA robot specifications across multiple equipment generations and robot-OEM brand portfolios.
For further engineering background on SCARA and articulated-robot joint-drive coupling specification, see Ever-power’s robotics-coupling engineering portal.

Industry Applications
SCARA-Robot Shoulder Axes
J1 and J2 axis drives on SCARA robots in electronics assembly, pharmaceutical packaging, and food-handling automation. Zero-backlash supports sub-arcminute positioning repeatability; clamp-mount preserves shaft surface across upgrades.
Photolithography Stage Axes
X-Y stage and wafer-rotation drives on photolithography exposure systems, mask aligners, and direct-write laser-pattern systems. POM-C slider damps motor-side vibration content from reaching the precision stage.
Semiconductor Wet-Process
Wet-bench indexing drives, chemical-mechanical polishing (CMP) wafer-rotation auxiliaries, and clean-process robot end-effector rotation axes. Stainless clamp-bolt variant supports chemical-process ambient compatibility.
Precision Packaging Machine Main
Main rotation drives on tablet-press main turrets, blister-pack machine indexing, and high-speed cartoning-machine main shafts. Pharma USP Class VI compatibility through POM-C slider variant.
️ Digital Printing Press Auxiliary
Sheet-feeder, registration-roller, and impression-cylinder auxiliary-drive axes on digital and offset printing presses. POM-C slider tolerates ink-mist ambient through chemical-resistance.
CMM & Optical Stage Drives
Coordinate-measuring-machine (CMM) probe-rotation axes, scientific-instrument turret drives, and precision-optics-bench stage drives. Vibration damping and zero-backlash support sub-micron measurement repeatability.
Why Choose Ever-power
Quality & Compliance
EP6C-50 production runs under ISO 9001:2015. Documentation pack covers RoHS, REACH, and CE conformity. For pharma packaging-line customers, USP Class VI documentation for the POM-C slider is supplied as standard. For semiconductor-OEM customers, SEMI standard particulate-emission documentation supports cleanroom-class qualification. For robotics-OEM customers, supplementary documentation supporting industrial-robot safety standard ISO 10218 integration is available.
Customisation
Catalogue bore range 14–20 mm; custom-bore variants from 12 mm to 22 mm produced under engineering review with 2-week lead time. Imperial-bore variants (5/8″, 3/4″, 7/8″) supported. 7075-T6 high-strength aluminum hub variant for reversal-duty robotics. Anti-static carbon-filled POM-C slider for ATEX Zone 2 and electronics-cleanroom installations. USP Class VI POM-C variant for pharma-validation documentation requirements.
Aftermarket
EP6C-50 slider plates and clamp-bolt sets stocked for 1-business-day shipment. 155 g mass per coupling supports air-freight standard. English-speaking engineering desk responds within 24 hours. For OEM partners and high-volume customers, customer-nominated buffer-stock arrangements supported with 24-hour replenishment SLAs.
Customer Reviews & Case Studies
★★★★★
Georgia — Industrial-Robotics OEM
Used in: J2 shoulder-axis drive coupling on a four-axis SCARA robot model for electronics-assembly applications.
Feedback: “Specified the EP6C-50 with 7075-T6 hub upgrade after detailed evaluation against bellows-coupling and disc-pack alternatives. The EP6C-50 has now shipped on approximately 2 200 SCARA units across 3 years of production. Field-warranty rate is meaningfully below the rate seen with the previous bellows-coupling specification. The clamp-mount has eliminated the shaft-marking complaint category from our warranty data entirely.”
★★★★★
Azerbaijan — Pharma Tablet-Press Operator
Used in: Tablet-press main-turret indexing-drive coupling on a high-speed tablet-press production line.
Feedback: “Pharma validation requirements made the original spider-coupling specification difficult — the elastomer material did not have full USP Class VI documentation that our regulatory team could accept. Switched to the EP6C-50 with USP Class VI POM-C slider; full documentation pack supported validation closure without additional regulatory work. Five years of three-shift production duty without coupling-attributable downtime. Excellent regulatory-aligned specification.”
★★★★☆
Tajikistan — Semiconductor Test-Assembly
Used in: Wet-bench wafer-handling robot wrist-axis drive on a semiconductor-back-end test facility.
Feedback: “Chemical-process ambient and continuous-three-shift production. The EP6C-50 with stainless clamp-bolt hardware has handled 4 years of duty across 18 wet-bench cells without coupling-attributable failure. Knock one star only because the initial lead time for the stainless-bolt variant was 3 weeks rather than the standard 2 weeks during a peak ordering period — engineering response addressed this through expedited production for our subsequent orders. Otherwise outstanding.”
Frequently Asked Questions
What is the M6 clamp-bolt torque specification?
The standard M6 clamp-bolt torque is 10 N·m for property class 12.9 hardware. Lower-class hardware (e.g., property class 8.8) requires 7 N·m. For A4-80 stainless clamp-bolt variants, torque is 8 N·m. The increased torque relative to EP6C-40’s M5 specification reflects the larger bolt cross-section and the higher rated torque. Calibrated torque-wrench installation is essential.
Does the EP6C-50 work with IEC 60072 standard servo motor shafts?
Yes — the 14–20 mm bore range corresponds directly to IEC 60072 standard frame-mounted servo motor output specifications for the 200–400 W power class. The EP6C-50 integrates with IEC 60072-compliant servo motors without requiring non-standard adapter parts or bushing modifications. Coupling-to-motor-flange face-to-face spacing accommodates standard reducer-input shaft lengths.
What is the USP Class VI compatibility documentation?
USP (United States Pharmacopeia) Class VI is the highest classification for biological-compatibility of pharmaceutical-contact materials. The POM-C slider’s USP Class VI documentation includes systemic-injection, intracutaneous, and implantation testing results showing biological compatibility. The documentation supports pharma-validation closure for tablet-press, blister-pack, and other pharma-process equipment installations where the coupling is in proximity to pharmaceutical product flow.
How does the EP6C-50 handle reversal-duty in robotics?
SCARA and articulated-robot deployments routinely involve reversal duty — the J1/J2 axis swings back and forth through wide arcs at substantial frequency. The EP6C-50’s POM-C slider has documented unlimited fatigue life under reversal-duty conditions, and the cross-slider architecture’s transmission is identical in both rotation directions. For high-cycle robotics (above 5 000 cycles per shift), the 7075-T6 hub upgrade is the engineering-preferred specification to address aluminum-hub fatigue accumulation in the clamp-section.
Is the EP6C-50 supported for ISO 10218 robotics safety standard integration?
Yes. The EP6C-50 is a mechanical asset with no electrical components, and does not require independent safety certification. For deployment in ISO 10218-compliant industrial robot designs, supplementary documentation covering the coupling’s failure-mode profile, gradual wear characteristics, and predictable maintenance routine supports straightforward Category 2 / Category 3 safety-function analysis. Please consult Ever-power engineering for application-specific safety documentation requirements.
Quote EP6C-50 for SCARA-Robot and Lithography Applications
For SCARA-robot shoulder, photolithography stage, semiconductor wet-process, precision packaging-machine main, digital-printing-press auxiliary, and CMM applications, the EP6C-50 is Ever-power’s preferred precision clamp-hub specification across the mid-bore servo range. Browse the wider EP6C clamp series catalogue, read about Ever-power’s precision-OEM supply capability, or move directly to a B2B enquiry below.


























