Description
EP6C-63 Precision Clamp-Hub Oldham Coupling — 63 mm Aluminum Hub for Heavy-Servo CNC and Articulated-Robot Joints
The EP6C-63 precision clamp Oldham coupling represents an important transition within the EP6C family — the point at which precision-coupling architecture begins overlapping the territory of light-industrial drives. With 33 N·m continuous / 66 N·m peak torque rating, 63 mm hub OD, 16–25 mm bore range, and 2 400 rpm permissible speed, the EP6C-63 is sized for heavy-servo CNC machine main-axis drives, articulated-robot main-joint (J1/J3) axes, paper-converting machine principal rotation drives, and the heavier end of motion-control systems in automation, medical equipment, and precision-process machinery. At this size class, the coupling is no longer simply a peripheral component — it sits in the principal load path of the host equipment and its specification is reviewed by senior mechanical engineering.
The EP6C-63 inherits the architectural advantages of the smaller EP6C family members — zero-backlash transmission, POM-C self-lubricating slider, clamp-hub mounting with full shaft preservation, substantial misalignment envelope — and scales them to support meaningfully higher torque transmission. The 16–25 mm bore range is the broadest in the EP6C family below the EP6C-70, accommodating IEC 60072 servo motor outputs across the 400 W to 1.5 kW continuous-power band. For OEM equipment designers specifying servo systems in this power class, the EP6C-63 provides a single specification covering motor-output to reduction-input shaft connections across multiple servo-system configurations — meaningfully simplifying the BOM-management and inventory-classification workflow.
Specifications
| Parameter | Value |
|---|---|
| Model | EP6C-63 |
| Continuous Torque (Tn) | 33 N·m |
| Peak Torque (Tmax) | 66 N·m |
| Permissible Speed (n) | 2 400 rpm |
| Bore Range (d) | 16 – 25 mm |
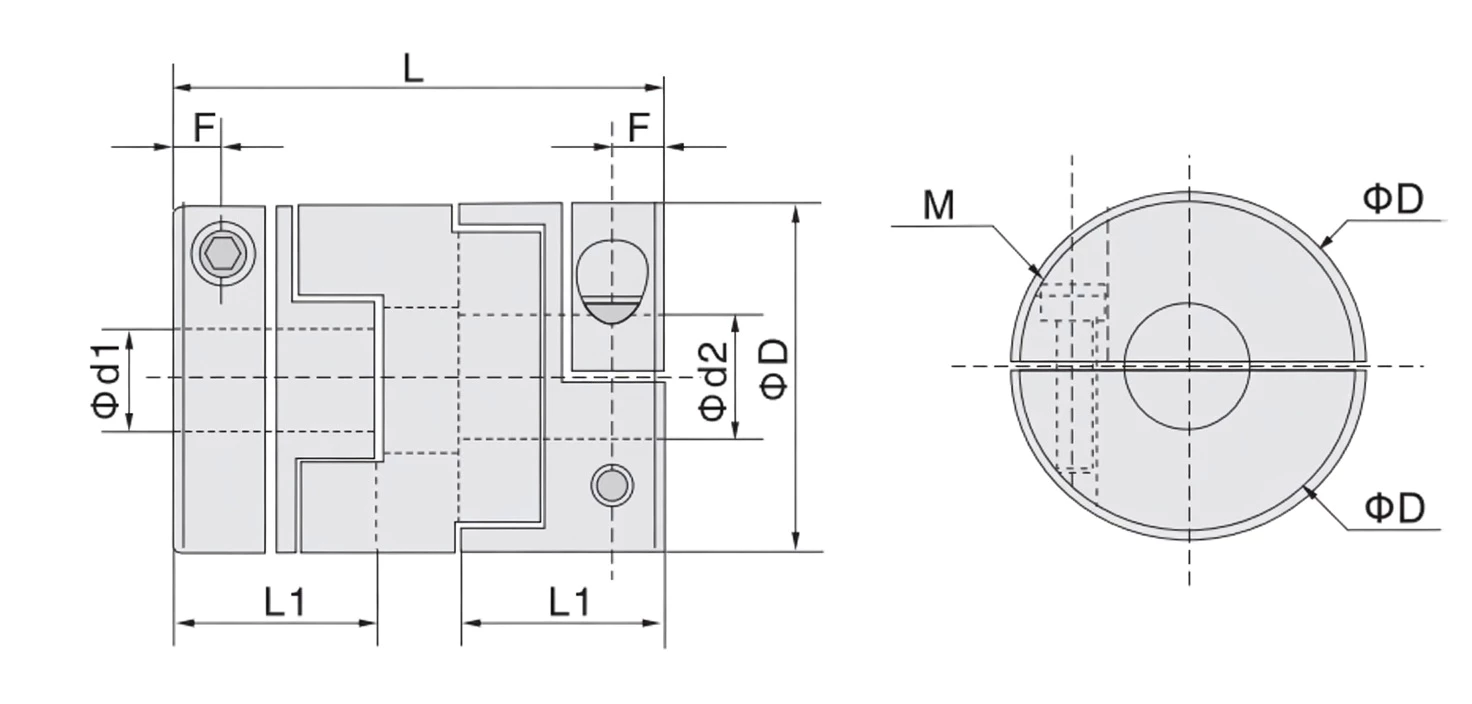
| Outside Diameter (D) | 63 mm |
| Overall Length (L) | 82 mm |
| Clamp Bolt Size | M8 (2 per hub) |
| Clamp Bolt Torque | 25 N·m |
| Radial Misalignment (Δy) | 0.8 mm |
| Angular Misalignment (Δα) | 1° |
| Axial Misalignment (Δx) | 0.8 mm |
| Mass | 285 g |
| Backlash | Zero |
| Operating Temperature | -30 °C to +80 °C |
Materials
2A12 / 7075-T6 Aluminum Hubs
Standard hub material is 2A12 aluminum alloy with full anodised treatment. For high-cycle robotics, paper-converting machinery, and articulated-robot main-joint deployments, 7075-T6 high-strength aluminum is the engineering-preferred specification — its higher fatigue endurance accommodates the substantial reversal-duty cycle counts typical of these application classes. Each hub at the standard specification masses approximately 125 g, contributing minimally to the host reflected-inertia profile.
Heavy-Duty POM-C Slider
The cross-slider is moulded in high-grade POM-C acetal polymer with PTFE additive for self-lubrication. At the EP6C-63’s torque rating, slider thickness is increased to address the higher per-face contact pressure during routine misalignment operation. The slider remains the dedicated wear part of the architecture — slider replacement, typically at 5–8 year intervals under continuous-duty applications, is a 5-minute maintenance task that requires no shaft re-positioning or torque-wrench operations.
M8 Class 12.9 Clamp Hardware
Standard clamp-bolt hardware is M8 socket-head cap-screw to ISO 4762, property class 12.9, electro-galvanic-zinc plated. For stainless-hub variants, A4-80 stainless clamp hardware is supplied with adjusted torque specification (20 N·m versus the standard 25 N·m). The M8 clamp-bolt size provides expanded torque margin for the higher rated peak (66 N·m) and accommodates the larger 25 mm maximum bore variant. Calibrated-torque installation is essential.
Engineering for Articulated-Robot Main Joints
Articulated robots — typically 6-axis vertical articulation designs spanning the substantial population of industrial-robot installations in automotive, electronics, and general-manufacturing applications — present specific engineering challenges that align well with the EP6C-63’s design profile. The J1 axis (base rotation) and J3 axis (forearm rotation) typically carry the highest torque demand in the robot kinematic chain, with peak torques approaching the limits of the reduction-gear output and substantial reversal-duty cycle counts (10 000–20 000 cycles per shift in high-utilisation production environments). The drive coupling between the servo motor and reduction-input shaft must transmit this torque without backlash, accommodate motor-and-reducer-frame misalignment, and survive the cumulative duty profile without measurable wear.
The EP6C-63’s response to this engineering challenge is built into its size and material selections. The 66 N·m peak torque rating provides comfortable margin against the typical 35–50 N·m peak demands of industrial-robot main-joint drives. The 0.8 mm parallel-misalignment envelope absorbs realistic frame-tolerance accumulation. The zero-backlash transmission supports the sub-arcminute repeatability that modern industrial robots target. And the POM-C slider’s documented unlimited fatigue life under reversal-duty conditions addresses the high-cycle-count profile without service-life concerns. For high-utilisation robot OEMs, the EP6C-63 with 7075-T6 hub upgrade is the engineering-preferred specification — ensuring expanded margin against accumulated fatigue across the host robot’s design-life envelope.
For further engineering background on industrial-robot main-joint coupling specification, see Ever-power’s robotics-coupling engineering resources.

Industry Applications
Articulated-Robot Main Joints
J1 (base rotation) and J3 (forearm rotation) drives on 6-axis industrial articulated robots in automotive welding, machine tending, and general manufacturing automation. 7075-T6 hub upgrade recommended for high-utilisation deployments.
⚙️ Heavy-Servo CNC Main Drives
Main-axis drives on CNC machining centres — X-axis, Y-axis, and Z-axis ball-screw input drives on machining centres in the 7–15 kW spindle-power class. POM-C slider provides vibration isolation that supports surface-finish accuracy.
Paper-Converting Principal Axes
Principal rotation drives on paper-converting machinery — slitting machines, sheeter folders, and bag-converting machine main shafts. Zero-backlash supports registration-accuracy targets across multiple converting stages.
Heavy Packaging Machine Main
Main rotation drives on heavy packaging machinery — case-erectors, palletizers, and end-of-line packaging-machine principal-shaft drives. Continuous-duty operation with frequent product-changeover cycles.
️ Industrial-Print Main Drives
Main impression-cylinder and registration-roll drives on industrial-print presses, large-format inkjet, and digital-press lines. POM-C slider tolerates ink-mist ambient through chemical-resistance properties.
CMM Gantry Main Drives
Main gantry-positioning drives on large coordinate-measuring machines (CMMs) and large-volume metrology installations. Vibration damping and zero-backlash support sub-micron measurement repeatability across large measurement volumes.
Why Choose Ever-power
Quality & Compliance
EP6C-63 production runs under ISO 9001:2015. Documentation pack covers RoHS, REACH, and CE conformity. For industrial-robot OEMs, supplementary documentation supporting ISO 10218-1 and ISO 13849 safety-function-category integration is available. For machine-tool OEMs, ISO 230-1 geometric-accuracy contribution documentation supports system-level performance specification. For converting-machinery OEMs, ISO 16092 safety-of-machinery compatibility statements are supplied.
Customisation
Catalogue bore range 16–25 mm; custom-bore variants from 14 mm to 28 mm produced under engineering review with 2-week lead time. Imperial-bore variants (3/4″, 7/8″, 1″) supported. 7075-T6 high-strength aluminum hub variant for high-utilisation robotics. Anti-static carbon-filled POM-C slider for ATEX Zone 2 and electronics-cleanroom installations. Hardfaced POM-C variant with surface-treatment for severe abrasive deployments.
Aftermarket
EP6C-63 slider plates and clamp-bolt sets stocked for 1-business-day shipment. 285 g mass per coupling supports air-freight standard. English-speaking engineering desk responds within 24 hours. For OEM partners and major customers, customer-nominated buffer-stock arrangements supported with 24-hour replenishment SLAs. For robot-OEM customers, annual reliability-review consultations are routinely offered.
Customer Reviews & Case Studies
★★★★★
Ghana — Automotive Tier-1 Supplier
Used in: J3 main-joint drive coupling on a 6-axis welding robot on a major automotive assembly line.
Feedback: “Continuous three-shift welding-cell duty (approximately 18 000 cycles per shift). Specified the EP6C-63 with 7075-T6 hub upgrade after detailed engineering review against bellows-coupling and disc-pack alternatives. Five years of continuous high-utilisation duty with one slider replacement during a planned cell maintenance window. Reliability has exceeded our engineering-life expectation by a clear margin. The clamp-hub mounting has been particularly valuable during robot-replacement events when the host shaft remains in place.”
★★★★★
Senegal — Industrial Packaging Operator
Used in: Case-erector main-rotation drive coupling on a high-speed corrugated-packaging end-of-line system.
Feedback: “Continuous-production duty with frequent product-changeover sequences. The EP6C-63 has handled 4 years of three-shift duty across 8 packaging lines with one slider replacement per line. Maintenance crew describes the slider-replacement task as ‘the easiest scheduled-maintenance touchpoint in the line’ — typical 5-minute task during a regular line-changeover window. Excellent operational specification.”
★★★★☆
Ivory Coast — Coordinate-Measuring Service
Used in: Main gantry-positioning drive coupling on a 2.5 m × 1.5 m bridge-type CMM installation.
Feedback: “Sub-micron measurement repeatability is the headline specification of our CMM operation. The EP6C-63’s POM-C slider provides excellent vibration-isolation between the gantry-drive motor and the measurement-axis structure. Five years of continuous-duty service without performance degradation. Knock one star only because we wish for a more detailed catalogue treatment of the coupling’s contribution to gantry-resonance frequency profile — useful information for our retrofit-specification analysis. Otherwise outstanding.”
Frequently Asked Questions
What is the M8 clamp-bolt torque specification?
The standard M8 clamp-bolt torque is 25 N·m for property class 12.9 hardware. Lower-class hardware (e.g., property class 8.8) requires 17 N·m. For A4-80 stainless clamp-bolt variants, torque is 20 N·m. The substantial torque increase relative to smaller EP6C members reflects the larger bolt cross-section and the requirement to develop sufficient hub-to-shaft clamp force for the rated 66 N·m peak transmission. Calibrated torque-wrench installation is mandatory.
When should I specify the 7075-T6 hub upgrade?
The 7075-T6 hub upgrade is engineering-preferred for: (1) industrial robotics with above 10 000 reversal cycles per shift; (2) paper-converting and packaging machines with frequent product-changeover load events; (3) machine-tool applications with substantial spindle-vibration coupling into the drive train; (4) any continuous-duty application where the host equipment is expected to outlive the standard 2A12 hub’s documented fatigue endurance. The upgrade cost premium is approximately 30 % over standard 2A12 specification.
What is the slider replacement procedure?
EP6C-63 slider replacement is a 5-minute maintenance task. Procedure: (1) loosen the four M8 clamp-bolts on both hubs to release shaft clamp-force; (2) carefully separate the two hubs along the shaft axis; (3) remove the worn slider from the inter-hub space; (4) install the new slider with correct orientation per supplied installation drawing; (5) rejoin the hubs and re-torque the clamp-bolts to 25 N·m using calibrated torque-wrench. No shaft re-positioning, no precision alignment work, no torque-sequence operations.
Is ISO 13849 safety-function integration supported?
Yes. For deployment in ISO 13849-compliant safety-related control architectures, the EP6C-63’s documented gradual failure mode, predictable wear progression, and field-inspectable failure-state characteristics support Performance Level (PL) d / Category 3 integration as part of broader safety-function analysis. Engineering-supplied documentation covers FMEA analysis, MTTFd estimation for the cross-slider architecture, and reliability-data inputs for system-level PL calculations.
What aftermarket support is available for high-utilisation customers?
For high-utilisation customers (industrial-robot OEMs, automotive Tier-1 suppliers, major packaging-machinery operators), Ever-power offers structured aftermarket support: (1) customer-nominated buffer-stock arrangements with 24-hour replenishment SLAs; (2) annual reliability-review consultations covering field-data analysis and recommendation refinement; (3) on-call engineering support during major plant-installation events; (4) volume-based commercial framework with predictable annual pricing. Programme terms negotiated with sales desk based on annual demand profile.
Quote EP6C-63 for Heavy-Servo and Robotics Applications
For articulated-robot main joint, heavy-servo CNC main, paper-converting principal, heavy packaging-machine main, industrial-print main, and CMM gantry applications, the EP6C-63 is Ever-power’s preferred precision clamp-hub specification across the upper-mid-bore servo range. Browse the wider EP6C clamp series catalogue, read about Ever-power’s precision-OEM supply capability, or move directly to a B2B enquiry below.


























